![]()
পিকারবট প্রো ব্যবহারকারী ম্যানুয়াল
দয়া করে মনে রাখবেন যে দেখানো ছবিগুলি শুধুমাত্র উদাহরণের উদ্দেশ্যে *।
লেখক: ওয়েন লিউ, রিলি স্মিথার্স
3 জুলাই 2024
সারাংশ
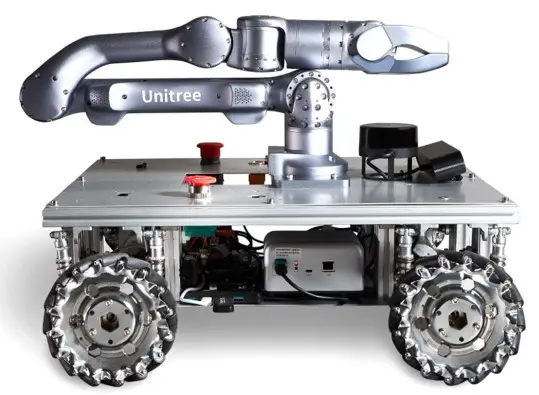
Pickerbot Pro হল একটি বহুমুখী R&D রোবোটিক্স প্ল্যাটফর্ম যা বিভিন্ন ধরনের অ্যাপ্লিকেশনের জন্য ব্যবহার করা যেতে পারে, যেমন কৃষি, খনন এবং নির্মাণ এবং রোবট-সহায়ক সরবরাহ, অনুসন্ধান এবং উদ্ধার প্রদর্শন এবং ম্যাপিং সহ বাড়ির ভিতরে।
1mm রিচ এবং 740kg পেলোড ক্ষমতা সহ Unitree Z3 Pro রোবোটিক আর্ম সমন্বিত, Pickerbot Pro 6 ডিগ্রী স্বাধীনতার সাথে ফোর্স ফিডব্যাক এবং সংঘর্ষ শনাক্ত করার ক্ষমতা সহ চিত্তাকর্ষক উচ্চারণ প্রদান করে।
একটি NVIDIA Jetson Orin সিরিজের একক-বোর্ড-কম্পিউটার (ন্যানো বা NX ভেরিয়েন্ট) দ্বারা চালিত, এটি CUDA ব্যবহার করে শক্তিশালী গ্রাফিক্স বা সমান্তরাল কম্পিউটিং কার্যকারিতা সহ আরও উন্নত কম্পিউটার ভিশন এবং মেশিন-লার্নিং কাজগুলি প্রদান করে, যেখানে একটি কমপ্যাক্ট এবং লাইটওয়েট ডিজাইন বজায় থাকে।
Pickerbot Pro একটি Orbbec 3D Astra ক্যামেরা দিয়ে সজ্জিত, যা ডেপথ সেন্সিং, অবজেক্ট ট্র্যাকিং এবং অঙ্গভঙ্গি শনাক্তকরণ ক্ষমতা প্রদান করে।
একটি মজবুত অথচ হালকা ওজনের চ্যাসিসে নির্মিত, পিকারবট প্রো অসম ভূখণ্ড জুড়ে উন্নত নেভিগেশনের জন্য স্বাধীন সাসপেনশন সহ একটি 4WD সিস্টেম বৈশিষ্ট্যযুক্ত। বৃহৎ মেকানাম চাকাগুলি সুনির্দিষ্ট সর্বমুখী গতিবিধি প্রদান করে কিন্তু উচ্চ গ্রিপ প্রদান করে।
মূল উপাদান এবং হার্ডওয়্যার
1.1 ROS 2 কন্ট্রোলার: NVIDIA Jetson Orin (NX 8GB বা Nano 4GB)
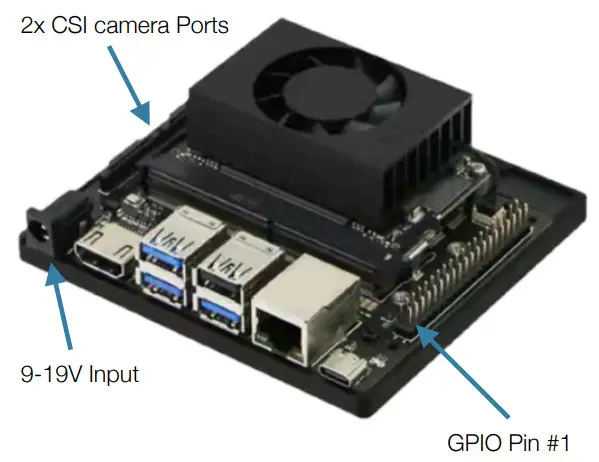
অনবোর্ড জেটসন ওরিন একক বোর্ড কম্পিউটার পিকারবট প্রো-কে শক্তিশালী এমবেডেড কম্পিউটিং প্রদান করে। এটি একটি 128gb SSD, ইন্টেল ওয়্যারলেস কার্ড এবং অনবোর্ড অ্যান্টেনা, HDMI, চারটি USB পোর্ট (যার মধ্যে 3টি USB 3.0), ইথারনেট এবং USB-C সহ আসে৷ 9-19V এর মধ্যে ব্যবহার করে বোর্ডকে পাওয়ার জন্য একটি DC ব্যারেল জ্যাক। অনবোর্ড GPIO পিনগুলি জনপ্রিয় রাস্পবেরি পাই সিঙ্গেল বোর্ড কম্পিউটারগুলির মতো একই মৌলিক বিন্যাস ব্যবহার করে, ইথারনেট পোর্টের সংলগ্ন বাইরের সারিতে পিন #1 দিয়ে শুরু হয়। একইভাবে, দুটি CSI ক্যামেরা সংযোগকারী রাস্পবেরি পাই ব্র্যান্ড এবং অনুরূপ ছোট-ফর্ম-ফ্যাক্টর ক্যামেরার সাথে কার্যকারিতা সক্ষম করে।
আগে থেকে ইনস্টল করা সফ্টওয়্যারটিতে রয়েছে ROS 2 Humble, Ubuntu 22.04, এবং NVIDIA Jetpack, যা Orin প্ল্যাটফর্মের সম্পূর্ণ সক্ষমতা সক্ষম করে।
দ্রষ্টব্য: চ্যাসিস কন্ট্রোলার এবং অন্যান্য রোবট উপাদানগুলির সাথে সামঞ্জস্য বজায় রাখতে, আমরা বিভিন্ন সফ্টওয়্যার দিয়ে জেটসন ওরিন ফ্ল্যাশ করার পরামর্শ দিই না। আরও উন্নত ব্যবহারের ক্ষেত্রে অনুগ্রহ করে Roboworks সহায়তার সাথে যোগাযোগ করুন।
1.2 সেন্সিং সিস্টেম: লিডার এবং ডেপথ ক্যামেরা
Pickerbot Pro একটি Leishen M10 LSLiDAR দিয়ে সজ্জিত। একটি 30m সর্বাধিক সনাক্তকরণ পরিসীমা এবং 12Hz ঘূর্ণনশীল স্ক্যানিং ফ্রিকোয়েন্সি, এবং একটি উচ্চ সংকেত-থেকে-শব্দ অনুপাত, অতিরিক্ত ফিল্টারিংয়ের প্রয়োজনীয়তা দূর করে৷ এটি নির্বিঘ্নে সংহত করে, চমৎকার ম্যাপিং এবং নেভিগেশনাল ক্ষমতা প্রদান করে।
উপরন্তু, Pickerbot Pro একটি Orbbec Astra গভীরতার ক্যামেরা দিয়ে সজ্জিত, যা একটি RGB গভীরতার ক্যামেরা। এই ক্যামেরাটি ROS 3 সহ অঙ্গভঙ্গি নিয়ন্ত্রণ, কঙ্কাল ট্র্যাকিং, 2D স্ক্যানিং, অবজেক্ট সনাক্তকরণ এবং পয়েন্ট ক্লাউড বিকাশ সহ বিভিন্ন ব্যবহারের জন্য অপ্টিমাইজ করা হয়েছে।
| গভীরতার রেজোলিউশন | আরজিবি রেজোলিউশন | আরজিবি সেন্স অ্যাঙ্গেল | গভীরতা FPS | আরজিবি ফ্রেমরেট | গভীরতা ফ্রেমরেট | গভীরতা পরিসীমা |
| 640×480 | 640×480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30fps | 30fps | 0.6~4m |
1.3 STM32 কন্ট্রোল বোর্ড (মোটর কন্ট্রোল এবং IMU)
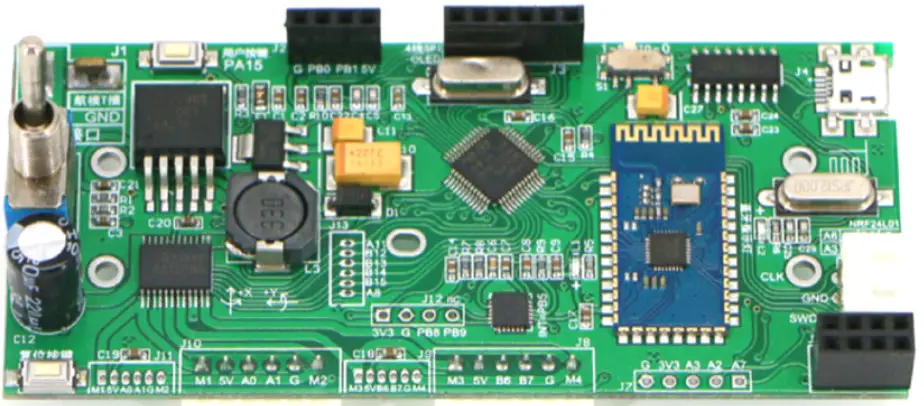
চ্যাসিস এবং মোটর নিয়ন্ত্রণের জন্য, পিকারবট প্রোতে একটি STM32 নিয়ন্ত্রণ বোর্ড রয়েছে। এই বোর্ড কম বিদ্যুত খরচ, সুনির্দিষ্ট মোটর নিয়ন্ত্রণ, মোটর নিরীক্ষণের জন্য OLED রিডআউট প্রদর্শন এবং একটি জড়তা পরিমাপ ইউনিট (IMU) নিশ্চিত করে। এটি আরও বিশেষায়িত অপারেশনের জন্য কনফিগার করা যেতে পারে, বা জেটসন ওরিন কন্ট্রোলারে এনকোডার প্রতিক্রিয়া সক্ষম করতে। STM32F103 সংকলন এবং পরবর্তী ফ্ল্যাশিংয়ের জন্য সফটওয়্যার প্যাকেজ Keil এবং FlyMCU ব্যবহার করা।
| STM32F103RC | বৈশিষ্ট্য |
| কোর | ARM32-bit Cortex -M3 CPU সর্বোচ্চ 72 MHz গতি |
| স্মৃতি | 512 KB ফ্ল্যাশ মেমরি 64kB SRAM |
| ঘড়ি, রিসেট এবং সরবরাহ ব্যবস্থাপনা | 2.0 থেকে 3.6 V অ্যাপ্লিকেশন সরবরাহ এবং I/Os |
| শক্তি | ঘুম. স্টপ এবং স্ট্যান্ডবাই মোড RTC এবং ব্যাকআপ রেজিস্টার BAT-এর জন্য V সরবরাহ |
| ডিএমএ | 12-চ্যানেল ডিএমএ নিয়ামক |
| ডিবাগ মোড | SWD এবং JTAG ইন্টারফেস Cortex-M3 এমবেডেড ট্রেস ম্যাক্রোসেল |
| I/O পোর্ট | 51 I/O পোর্ট (16টি এক্সটার্নাল ইন্টারাপ্ট ভেক্টর এবং 5V টলারেন্টে ম্যাপযোগ্য) |
| টাইমার | 4×16-বিট টাইমার 2 x 16-বিট মোটর নিয়ন্ত্রণ PWM টাইমার (জরুরি স্টপ সহ) 2 এক্স ওয়াচডগ টাইমার (স্বাধীন এবং উইন্ডো) SysTick টাইমার (24-বিট ডাউনকাউন্টার) DAC চালাতে 2 x 16-বিট বেসিক টাইমার |
| কমিউনিকেশন ইন্টারফেস | USB 2.0 পূর্ণ গতির ইন্টারফেস SDIO ইন্টারফেস CAN ইন্টারফেস (2.0B সক্রিয়) |
1.4 চ্যাসি ওভারview এবং ব্যাটারি বিকল্প
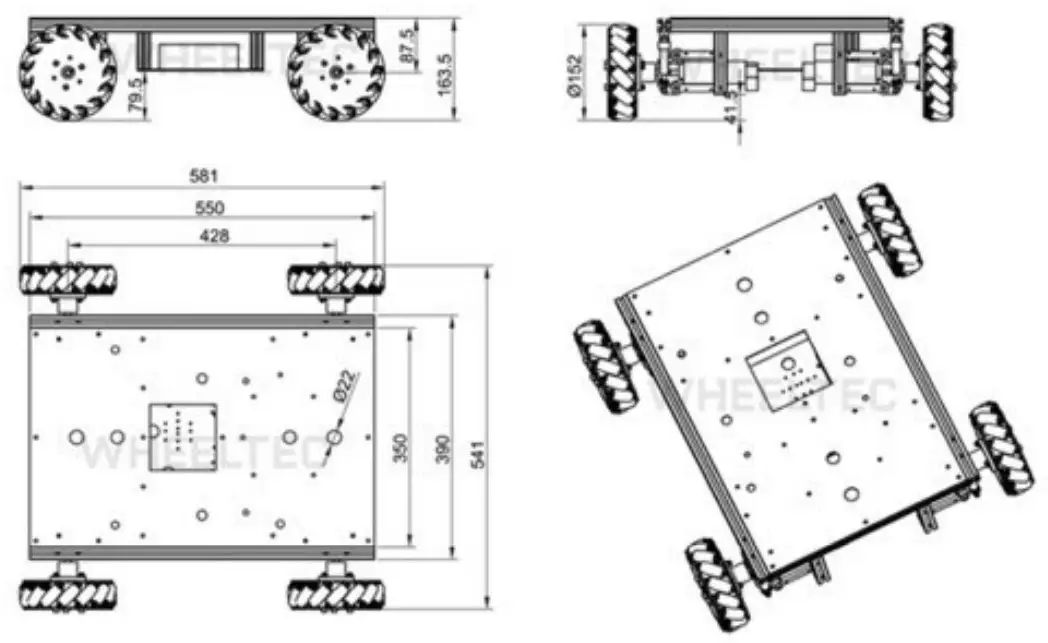
পিকারবট প্রো সর্বমুখী মেকানাম চাকা দিয়ে সজ্জিত, প্রতিটিতে 45-ডিগ্রি অফসেট রোলার রয়েছে যা সমস্ত দিকে গতিশীলতাকে সহজতর করে। এটি লক্ষ্য করা গুরুত্বপূর্ণ যে এই চাকা জোড়ায় জোড়ায় সরবরাহ করা হয়, প্রতিটি জোড়ার রোলার ভিন্নভাবে ভিত্তিক। রোবটে ইনস্টল করার সময়, নিশ্চিত করুন যে তির্যক বিপরীত চাকার রোলারগুলি একই দিকে নির্দেশ করছে। যদি রোবটটি অপ্রত্যাশিতভাবে নড়াচড়া করে, তবে কেবল চাকার জোড়া বিপরীত করুন।
ব্যাটারির ক্ষমতা বাড়ানোর সময় অবশ্যই বিবেচনা করা উচিত। Pickerbot Pro একটি 5000 mAh ব্যাটারির সাথে স্ট্যান্ডার্ড আসে এবং অতিরিক্ত খরচের জন্য 10,000 বা 20,000 mAh বিকল্পে আপগ্রেড করা যেতে পারে। 20,000 mAh ব্যাটারি পিকারবট প্রো-এর চ্যাসিসের মধ্যে ফিট করার জন্য খুব বড় এবং শুধুমাত্র রোবট চ্যাসিসের উপরে ইনস্টল করা যেতে পারে। ওজন এবং আকারের পরামিতিগুলির জন্য দয়া করে নীচের টেবিলটি পড়ুন।
| ব্যাটারি প্যারামিটার | বৈশিষ্ট্য | ||
| 5000mAh | 10000mAh | 20000mAh | |
| ব্যাটারি ভলিউমtage | 22.2V | 22.2V | 22.2V |
| আকার | 124*71*42 মিমি | 124*71*71 মিমি | 156*122*71 মিমি |
| পাওয়ার চার্জার | DC 5.5 চার্জিং প্লাগ টি-আকৃতির স্রাব প্লাগ |
DC 5.5 চার্জিং প্লাগ টি-আকৃতির স্রাব প্লাগ |
DC 5.5 চার্জিং প্লাগ টি-আকৃতির স্রাব প্লাগ |
| কর্মক্ষমতা | ধারাবাহিক 15 এ d ইসচার্জ |
30A ক্রমাগত স্রাব | 60A ক্রমাগত স্রাব |
| ওজন | 0.66 কেজি | 1.25 কেজি | 2.4 কেজি |
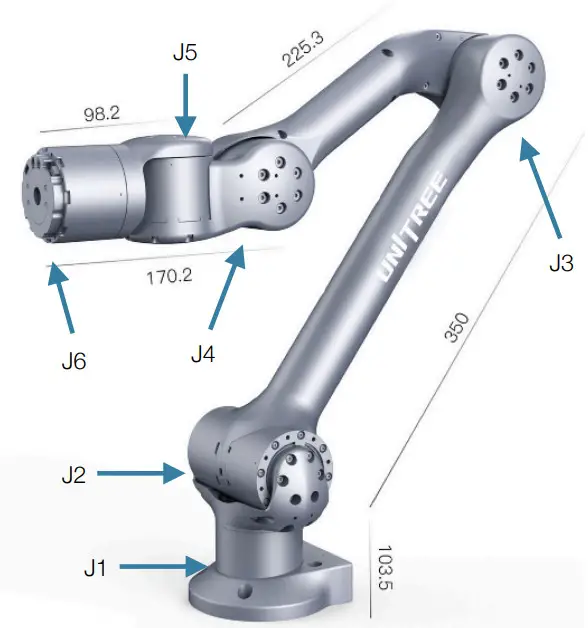
1.5 Unitree Z1 Pro রোবোটিক আর্ম
Pickerbot Pro Unitree Z1 Pro রোবোটিক আর্ম অন্তর্ভুক্ত করে, যা 6 ডিগ্রি স্বাধীনতা এবং 740 মিমি নাগালের সাথে চিত্তাকর্ষক উচ্চারণ প্রদান করে। আপনার নির্দিষ্ট প্রয়োজনীয়তা পূরণের জন্য গতিবিদ্যা কাস্টমাইজ করার জন্য নীচের যৌথ প্যারামিটার টেবিলটি পড়ুন।
| জয়েন্ট | গতির পরিসর | সর্বোচ্চ গতি | সর্বোচ্চ ঘূর্ণন সঁচারক বল |
| J1 | ±150° | 180°/সে | 33N·m |
| J2 | ০—৫৪০° | 180°/সে | 33N·m |
| J3 | -165°—0 | 180°/সে | 33N·m |
| J4 | ±80° | 180°/সে | 33N·m |
| J5 | ±85° | 180°/সে | 33N·m |
| J6 | ±160 | 180°/সে | 33N·m |
| প্যারামিটার | Z1 প্রো |
| ওজন | 4.5 কেজি |
| পেলোড | 3 কেজি |
| পৌঁছান | 740 মিমি |
| পুনরাবৃত্তিযোগ্যতা | ~0.1 মিমি |
| পাওয়ার সাপ্লাই | 24V |
| ইন্টারফেস | ইথারনেট |
| সামঞ্জস্যপূর্ণ অপারেটিং সিস্টেম | উবুন্টু |
| সর্বোচ্চ শক্তি | 500W |
| ফোর্স ফিডব্যাক | হ্যাঁ |
সফ্টওয়্যার এবং শুরু করা
2.1 ROS 2 দ্রুত শুরু
যখন রোবটটি প্রথম চালিত হয়, তখন এটি ডিফল্টরূপে ROS দ্বারা নিয়ন্ত্রিত হয়। অর্থ, STM32 চ্যাসিস কন্ট্রোলার বোর্ড ROS 2 কন্ট্রোলার - জেটসন ওরিন থেকে কমান্ড গ্রহণ করে।
প্রাথমিক সেটআপ দ্রুত এবং সহজ, আপনার হোস্ট পিসি (উবুন্টু লিনাক্স প্রস্তাবিত) থেকে রোবটের ওয়াই-ফাই হটস্পটের সাথে সংযোগ করুন। ডিফল্টরূপে পাসওয়ার্ড হল "ডংগুয়ান"।
এরপর, লিনাক্স টার্মিনালের মাধ্যমে SSH ব্যবহার করে রোবটের সাথে সংযোগ করুন, IP ঠিকানা হল 192.168.0.100, ডিফল্ট পাসওয়ার্ড হল ডংগুয়ান৷
![]()
রোবটের টার্মিনাল অ্যাক্সেসের সাথে, আপনি "wheeltec_ROS 2" এর অধীনে ROS 2 ওয়ার্কস্পেস ফোল্ডারে নেভিগেট করতে পারেন, পরীক্ষার প্রোগ্রামগুলি চালানোর আগে, wheeltec_ROS 2/turn_on_wheeltec_robot/-এ নেভিগেট করতে পারেন এবং wheeltec_udev.sh সনাক্ত করতে পারেন – এই স্ক্রিপ্টটি সাধারণত একবার চালানো উচিত পেরিফেরালগুলির সঠিক কনফিগারেশন নিশ্চিত করতে।
আপনি এখন রোবটের কার্যকারিতা পরীক্ষা করতে সক্ষম, ROS 2 কন্ট্রোলার কার্যকারিতা চালু করতে, চালান: “roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
![]()
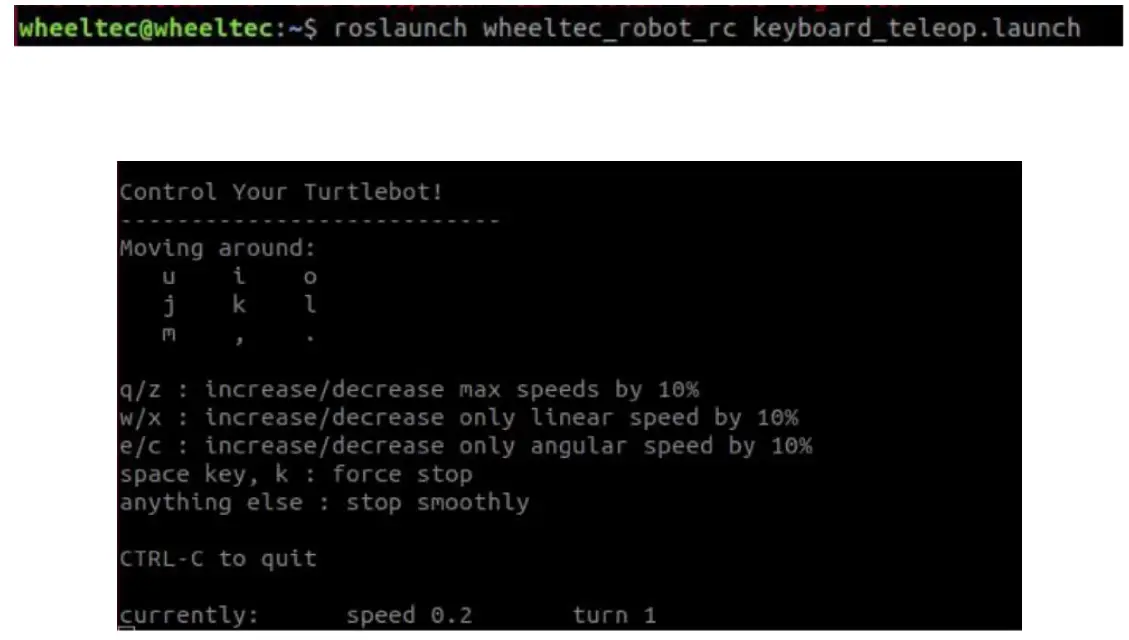
একটি দ্বিতীয় টার্মিনালে, আপনি চেসিস নিয়ন্ত্রণ যাচাই করতে keyboard_teleop নোড ব্যবহার করতে পারেন, এটি জনপ্রিয় ROS 2 Turtlebot ex-এর একটি পরিবর্তিত সংস্করণampলে প্রকার: "roslaunch wheeltec_robot_rc keyboard_teleop.launch"
2.2 চ্যাসিসের জন্য প্রাক-ইনস্টল করা ROS 2 প্যাকেজ
নীচে নিম্নলিখিত ব্যবহারকারী-ভিত্তিক প্যাকেজগুলি রয়েছে, যদিও অন্যান্য প্যাকেজগুলি উপস্থিত থাকতে পারে, এগুলি কেবলমাত্র নির্ভরতা।
turn_on_wheeltec_robot
এই প্যাকেজটি রোবট কার্যকারিতা সক্ষম করার জন্য এবং চ্যাসিস কন্ট্রোলারের সাথে যোগাযোগের জন্য অত্যন্ত গুরুত্বপূর্ণ।
প্রাথমিক স্ক্রিপ্ট "turn_on_wheeltec_robot.launch" অবশ্যই ROS 2 এবং কন্ট্রোলার কনফিগার করতে প্রতিটি বুটে ব্যবহার করতে হবে।
wheeltec_rviz2
পিকারবট প্রো-এর জন্য কাস্টম কনফিগারেশন সহ rviz চালু করার জন্য লঞ্চ ফাইলগুলি রয়েছে৷
wheeltec_robot_slam
পিকারবট প্রো-এর জন্য কাস্টম কনফিগারেশন সহ SLAM ম্যাপিং এবং স্থানীয়করণ প্যাকেজ।
wheeltec_robot_rrt2
দ্রুত র্যান্ডম ট্রি অ্যালগরিদম অন্বেষণ - এই প্যাকেজটি পিকারবট প্রোকে অন্বেষণ নোড চালু করার মাধ্যমে তার পছন্দসই অবস্থানে যাওয়ার পথের পরিকল্পনা করতে সক্ষম করে৷
wheeltec_robot_keyboard
দূরবর্তী হোস্ট পিসি সহ কীবোর্ড ব্যবহার করে রোবট কার্যকারিতা যাচাই এবং নিয়ন্ত্রণের জন্য সুবিধাজনক প্যাকেজ।
wheeltec_robot_nav2
ROS 2 নেভিগেশন 2 নোড প্যাকেজ।
wheeltec_lidar_ROS 2
Leishen M2/N10 কনফিগার করার জন্য ROS 10 Lidar প্যাকেজ।
wheeltec_joy
জয়স্টিক কন্ট্রোল প্যাকেজ, জয়স্টিক নোডের জন্য লঞ্চ ফাইল ধারণ করে।
simple_follower_ROS 2
লেজার স্ক্যান বা ডেপথ ক্যামেরা ব্যবহার করে অ্যালগরিদম অনুসরণ করে বেসিক অবজেক্ট এবং লাইন।
ROS 2_astra_camera
ড্রাইভার এবং লঞ্চ ফাইল সহ Astra গভীরতার ক্যামেরা প্যাকেজ।
রোবোটিক আর্ম ইন্টিগ্রেশন
3.1 রোবোটিক আর্ম তারের উপাদান
Unitree Z1 প্রস্তাবিত তারের
নীচে Unitree Z1 হাতের জন্য প্রস্তাবিত তারের উপাদানগুলি রয়েছে৷ পাওয়ার সুইচের পরে ব্রেকআউটে একটি উপলব্ধ মহিলা 2-পোল ডিন সংযোগকারী থাকা উচিত। উপাদানগুলিকে সিরিজে সংযুক্ত করুন। সংযোগকারী +/GND সংযোগ মিলছে তা নিশ্চিত করুন। ব্লেড ফিউজ ধারক পজিটিভ পাওয়ার লাইনে বসতে হবে।
| কম্পোনেন্ট | পরিমাণ |
| পুরুষ ডিন শৈলী 2 মেরু সংযোগকারী | x1 |
| পুরুষ xt60 শৈলী 2 মেরু সংযোগকারী | x1 |
| ইনলাইন ব্লেড ফিউজ ধারক | x1 |
| 14 AWG 2 কোর কেবল | x1 |
| 7.5 ব্লেড ফিউজ | x1 |
যেহেতু আর্মটিতে শুধুমাত্র আপেক্ষিক এনকোডার রয়েছে তাই প্রতিটি স্টার্ট-আপে একই অবস্থানে রিসেট করতে হবে। রিসেট করার জন্য আর্মটি সহজে চালু এবং বন্ধ করার জন্য তারের মধ্যে সিরিজের একটি সুইচ সংযুক্ত করা আপনার কাছে সার্থক মনে হতে পারে।
দ্রষ্টব্য: Unitree ডকুমেন্টেশন বলছে বাহু 20A জন্য রেট করা হয়েছে. এটা ভুল। প্রতিটি পাওয়ার সাপ্লাইয়ের জন্য একটি 10A SMD ফিউজ সিরিজে সংযুক্ত থাকে। একটি 7.5A ফিউজ ব্যবহার করলে 10A SMD ফিউজের আগে ফুঁ হবে এবং প্রতিস্থাপন করা উল্লেখযোগ্যভাবে সহজ হবে।
দ্রষ্টব্য: সিস্টেমে ইউনিটট্রি জেড 1 বাহুর অতিরিক্ত ওজনের কারণে সামনের স্প্রিংগুলি আর্মটিকে সমর্থন করতে অক্ষম। ড্রপ-ইন 70mm*16mm কম্প্রেশন স্প্রিংস পাওয়া যাবে এবং স্টক স্প্রিংসের জায়গায় ব্যবহার করা যাবে। বিকল্পভাবে, শককে ঘিরে থাকা বড় স্প্রিংস ব্যবহার করা যেতে পারে।
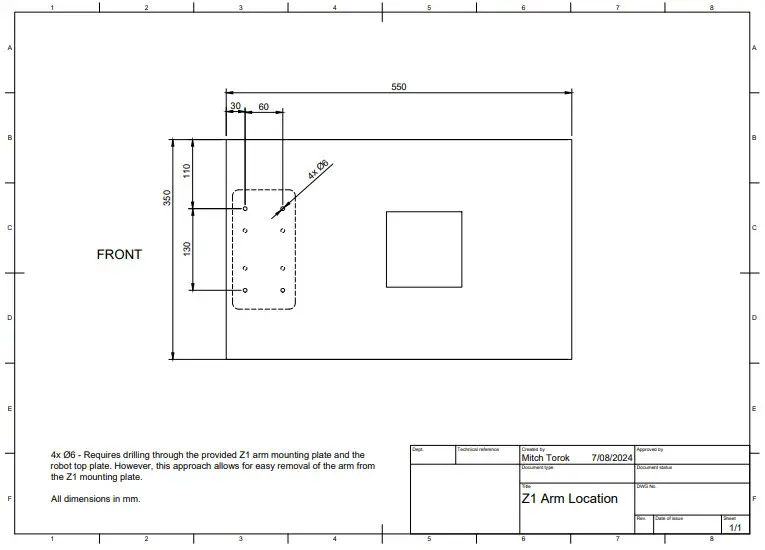
3.2 রোবোটিক আর্ম মাউন্টিং অঙ্কন
3.3 এসampরোবোটিক হাতের জন্য কোড
এই ব্যবহারকারীর ম্যানুয়াল তৈরির সময়ে, Z1 Pro-এর জন্য Unitree-এর SDK শুধুমাত্র ROS 1 মেলোডিক বা নোয়েটিক সমর্থন করে৷
পিকারবট প্রো প্রোডাক্ট টিম এস ডেভেলপ করেছেampROS 2-এ le কোড চ্যাসিসের সাথে সামঞ্জস্যপূর্ণ।
এসampZ1 প্রো রোবোটিক আর্মকে চেসিসের সাথে সংহত করার জন্য le কোড নিচের GitHub রিপোজিটরি থেকে পাওয়া যাবে:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
কপিরাইট © 2024 Roboworks. সমস্ত অধিকার সংরক্ষিত.
দলিল/সম্পদ
 |
ROBOWORKS Pickerbot Pro পিক এবং ড্রপ মোবাইল রোবট [পিডিএফ] ব্যবহারকারী ম্যানুয়াল পিকারবট প্রো, পিকারবট প্রো পিক অ্যান্ড ড্রপ মোবাইল রোবট, পিক অ্যান্ড ড্রপ মোবাইল রোবট, ড্রপ মোবাইল রোবট, মোবাইল রোবট, রোবট |